(docs.opencv.org 참조)
형태학적 변환 Morphological Transformation은 이미지 형태를 기반으로 한 몇 가지 단순한 연산이며, 보통 이진 Binary 이미지에서 수행됩니다. 한 단계 더 나아가 그레이 Gray 이미지에서도 가능합니다. 동작을 위해서는 원본 이미지와 변환의 특성을 결정하는 마스크 또는 커널을 활용합니다. 기본적인 형태학 연산자는 침식 Erosion과 팽창 Dilation입니다. 그리고 열림 Opening, 닫힘Closing, 기울기 Gradient 등과 같은 변형 연산도 수행할 수 있습니다. 현 블로그에서는 이진 이미지 기준으로 기본 변환을 설명합니다.
영상처리에서 형태학적 변환 연산은 관심영역 또는 물체의 크기를 재정의 하거나 잡음 Noise 제거에 빈번히 활용됩니다.
1. 침식 Erosion 연산
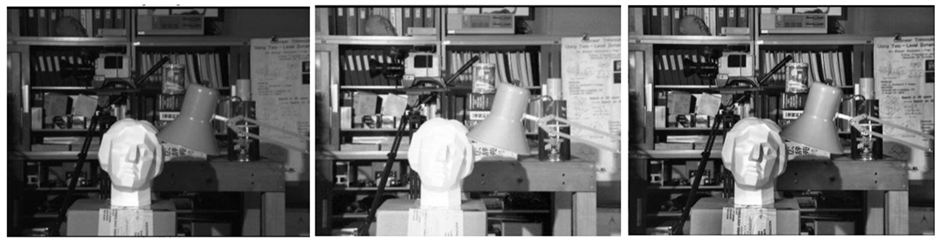
침식 Erosion은 흰색 영역을 전경이라고 했을 때 흰색 영역의 가장자리를 기준으로 감소시키는 역할을 합니다. 기본 동작은 원본 이미지 기준으로 커널 간 컨볼루션 Convolution 수행이며, 원본 이미지의 픽셀(1 또는 0)은 커널 아래의 모든 픽셀이 1일 때만 1로 간주되고, 그렇지 않으면 침식됩니다(0으로 만듭니다). 따라서 커널의 크기에 따라 경계 근처의 픽셀들이 모두 침식될 수 있으며, 전경 객체의 두께나 크기가 감소하거나 이미지에서 단순히 흰색 영역이 감소합니다. 작은 흰색 잡음을 제거하거나, 연결된 두 개의 객체를 분리하는 등에 유용합니다. Python 예에서 커널 kenel은 모든 element가 1인 5X5 매트릭스이며, Input_Img와 결과 이미지는 이진 Binary 이미지 입니다.
Python Example)
kernel = np.ones((5,5),np.uint8)
Erosion_Img = cv.erode(Input_Img, kernel, iterations = 1)

2. 팽창 Dilation 연산
팽창 연산은 침식과 반대의 효과를 내며, 커널 아래의 적어도 하나의 픽셀이 '1'이면 픽셀 요소는 '1'입니다. 따라서 이미지에서 흰색 영역이 커지거나 전경 물체의 크기가 커집니다. 침식은 배경에 잡음을 제거하는 효과가 있다면 팽창은 전경 내에 잡음 제거에 효과가 있습니다.
Dilation_Img = cv.dilate(Input_Img, kernel, iterations = 1)

3. 열림 Opening 연산
앞에 설명한 침식과 팽창이 연속 연산을 통해 또 다른 효과를 낼 수 있습니다. 열림 Opening 연산은 침식 연산 후에 팽창 연산을 의미합니다. 그림에서와 같이 침식 효과를 통해 배경 잡음을 제거하고 팽창을 통해 전경의 크기를 보전합니다.
Opening_Img = cv.morphologyEx(Input_mg, cv.MORPH_OPEN, kernel)

4. 닫힘 Closing 연산
닫힘 연산은 팽창 연산 후 침식 연산을 수행합니다. 그림에서 같이 팽창의 효과로 전경의 잡음을 제거하고 침식을 통해 전경의 크기를 보전합니다.
Closing_Img = cv.morphologyEx(Input_Img, cv.MORPH_CLOSE, kernel)

5. Morphological Gradient
그림에서 같이 팽창 연산 결과와 침식 연산 결과의 차(뺄셈) 연산을 통해 관심 영역인 전경의 에지 Edge를 추출할 수 있습니다.
Gradient_Img = cv.morphologyEx(Input_Img, cv.MORPH_GRADIENT, kernel)

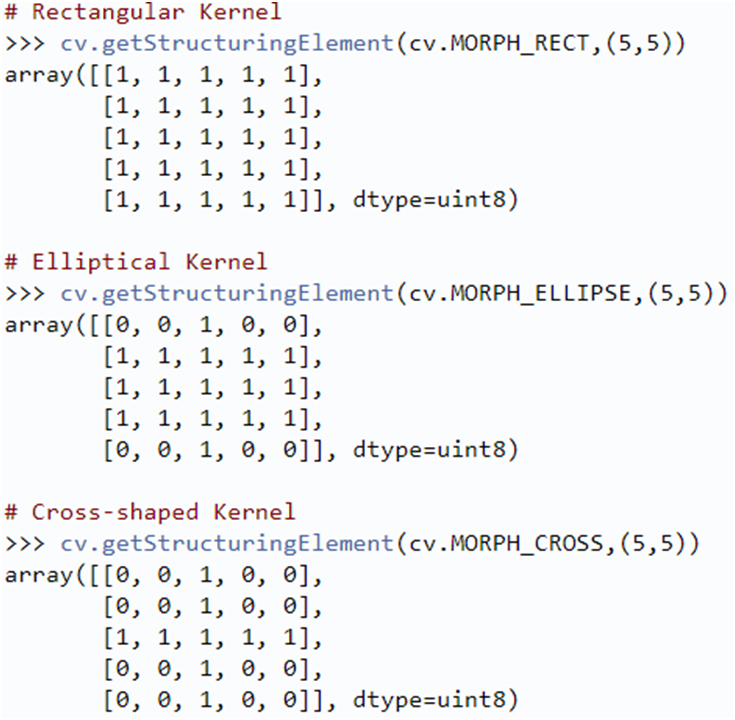
6. 커널 Structuring Element
보통 커널의 형태는 직사각형 모양입니다. 그러나 경우에 따라 타원형 또는 원형 커널이 필요할 수 있습니다. 이를 위해 OpenCV에는 cv.getStructuringElement()라는 함수가 있으며, 커널의 모양과 크기를 전달하면 원하는 커널을 얻을 수 있습니다. 그림은 Python 활용 예입니다.
'영상처리 도구' 카테고리의 다른 글
| OpenCV 칼라 처리 및 변환 cvtColor (1) | 2023.12.10 |
|---|---|
| OpenCV 이미지 산술연산과 논리연산, 혼합 Image Blending (0) | 2023.11.26 |
| OpenCV 이미지 평활화 Histogram Equalization (0) | 2023.11.04 |
| OpenCV 블러링 Blurring, 스무딩 Smoothing (0) | 2018.06.14 |
| OpenCV 윤곽선 검출 Edge Detection (0) | 2018.01.15 |